控制器研发日志
法式咖啡
双味双能
功能描述
直流电机控制
- 2部直流电机
- 运行方向调节
- 运行时间调节
- 速度调节
- 实时控制
- 时序控制
- 电源电压 6 - 12V
串口舵机控制
- 255部串口舵机
- 实时控制
- 时序控制
- 总线、环形、混合网络结构
- 电源电压 6 - 12V
人机接口
- 触摸屏
- 集成彩色点阵
- 集成8点LED
- 2 LEDs

Camellia 微型控制器 - 法式咖啡
| 01 | 电源 | 电源端口,用于控制器和直流电机 6VDC – 12VDC。 |
| 02 | 直流电机 | 2路直流电机控制端口。 |
| 03 | LED | 2路LED控制端口。 |
| 04 | 模式选择开关 | 选择局域网或广域网工作模式。 |
| 05 | 集成点阵显示 | 8x8彩色点阵。 |
| 06 | 多点LED | 集成8点LED。 |
| 08 | 人机接口 | 触摸屏端口。 |
| 09 | 串口舵机 | UART串口舵机控制端口。 * 提供独立电源接线端子。 |






局域网和广域网
 Camellia 微型控制器可以轻松切换,选择工作在 Access Point 或 Station 模式。
Camellia 微型控制器可以轻松切换,选择工作在 Access Point 或 Station 模式。
Camellia 微型控制器内部的无线芯片设置为 Access Point 模式,手机、平板、电脑等作为 Station 。
Camellia 微型控制器可以进行路由连接参数或 IP 地址设置。
将手机、平板、电脑连接到安装了 Camellia 微型控制器的智能设备作为服务器的无线网络中,即可直接与通讯。这本质是一种无线局域网。
20世纪90年代,电气和电子工程师协会 Institute of Electrical and Electronics Engineers 成立了 802.11 工作组。1991年,美国 National Cash Register 公司和其合资伙伴 American Telephone and Telegraph 公司( Bell Telephone )在荷兰 Neuwegein 开发出了 WaveLAN 技术,即 Wi-Fi 的雏形。于此同时,悉尼大学的研究机构 Commonwealth Scientific and Industrial Research Organisation 也发明了一种无线网技术,于1996年取得了用于无线局域网标准的底层技术专利,该技术专利跟 IEEE 目前的 802.11a 与 802.11g 无线标准有相当密切的关系。
Intersil 、 3Com 、 Nokia 、 Aironet 、 Symbol 和 Alcatel-Lucent 这 6 家公司,共同组成了无线以太网路相容性联盟( Wireless Ethernet Compatibility Alliance ),对不同厂家的产品进行兼容性认证,实现不同厂家设备间的互操作性。联盟成立之后,为了便于市场推广,于2002年10月选取 Wi-Fi 作为其名称, Wi-Fi 有着 wireless fidelity(无线保真)的含义。WECA 改名为 Wi-Fi 联盟( Wi-Fi Alliance ) 。
 把办公室或家中连接到 Internet 的路由器作为 Access Point ,而手机、平板、电脑等作为 Station ,Camellia 微型控制器也作为 Station 。Camellia 微型控制器可以轻松与任何路由器或手机热点自动连接,连接到互联网络。
把办公室或家中连接到 Internet 的路由器作为 Access Point ,而手机、平板、电脑等作为 Station ,Camellia 微型控制器也作为 Station 。Camellia 微型控制器可以轻松与任何路由器或手机热点自动连接,连接到互联网络。
这种模式下,手机、平板、电脑与智能设备的通讯,必须经过路由器转发。
如果把手机、平板、电脑和 Camellia 微型控制器设置在不同的局域网络中,即各自连接到不同的路由器。例如 Camellia 微型控制器连接到家中的路由器,在数公里外的办公室中,手机、平板、电脑连接到办公室的路由器,两个路由器又同时连接到 Internet ,或是手机、平板、电脑直接通过 4G 或 5G 蜂窝通讯技术连接到 Internet ,就可以通过MQTT技术实现远程控制,这样无论你坐在办公室中,或是漫步在公园中,你都可以轻点手机,轻松操作在家中的安装了 Camellia 微型控制器的机器人或智能设备,打造了自己的远程物联网络。
Message Queuing Telemetry Transport 是物联网通讯互联协议中被广泛使用的一种。
MQTT 协议也一种是建立连接后的通讯协议,每个用户首先需要与服务器建立连接,服务器是一个中间环节。当与服务器建立连接后,还需要一个额外的步骤,即订阅( subscribe )主题 ( topic ),每个主题可以被多个用户订阅,每个用户也可以订阅多个主题。
订阅了同一个主题的用户,无论谁向这个主题发送消息( publish ),其他所有已经订阅该主题的用户都会收到该消息,这就好似大家建立了一个小社团,而服务器就是这个社团的秘书或称作中间代理人( broker )。
如果要实现点对点的单独通讯:
- 可以两设备订阅一个只有这两个设备知道的唯一主题;
- 或是在主题中加入对方的 ID 信息,服务器辨识发来信息中的主题中如果含有 ID 信息,则将仅把消息转发给该 ID 的设备。

脉宽调制技术
采用脉冲宽度调制( Pulse Width Modulation )的技术进行电机控制,其本质是将模拟控制信号变换为一种脉冲控制信号。
在这种脉冲信号中,采用占空比( Duty Cycle )描述一个脉冲周期中,高电平的持续时间与一个周期的比值。占空比值越大,对应的能量也越大,因此输入给电机的能量(电压或电流的平均值)和脉冲的占空比相关。
如果对电机输入模拟控制信号,即在一定范围内,连续调整输入到电机的电压或电流值,由于电机通常具有惯性,则其反应具有一定程度的滞后性,控制效果较差;但是当采用脉冲宽度调制技术进行控制,输入不同占空比的脉冲信号时,就可以克服这个缺陷。此外,由于脉冲信号在低电平时,外围电路没有电流通过,因此脉冲信号具有功耗低、抗干扰能力强等优点。
占空比仅是不同的高电平值与周期的比值,当改变周期的长度时,可以获得不同频率的脉冲控制信号。由于每种类型的电机的固有特性不同,严格意义上讲,脉冲宽度调制技术产生的脉冲控制信号的频率应当与负载相匹配,才能更加平滑地控制。简单的说,对不同的电机的脉冲宽度调制信号的周期是不同的,对同一种电机,其脉冲宽度调制信号的周期是固定的,通过改变占空比值的大小实现调节控制。
Camellia 微型控制器控制直流电机,输入大约 6kHz 的 PWM 信号作为直接控制信号,每一种占空比值对应电机的一个转速。
Camellia 微型控制器控制伺服舵机,输入 50Hz 左右的 PWM信号 作为给定值,每一种占空比值对应电机的一个旋转角度(位置)。
PWM控制信号: 5% 至 95% 可调,频率 40Hz 至 7kHz 可设定。

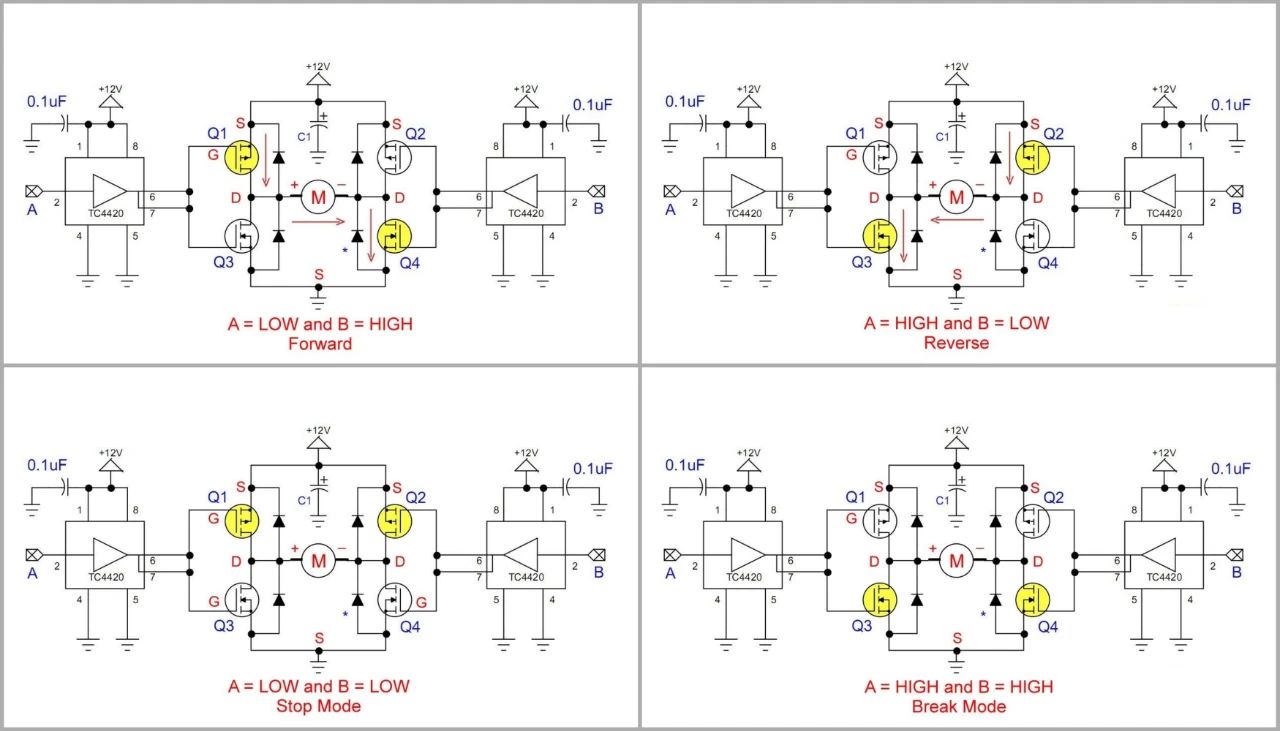
H桥电路
H 桥是一种电子电路,可使其连接的负载或输出端两端电压反相/电流反向。
Camellia 微型控制器同时通过 H 桥电路技术( H-Bridge )实现电机正转、反转控制。
UART串口网络
Camellia 微型控制器 采用串口网络技术,通过一组电缆把控制器、多部电机依次接力连接,避免了每部电机与控制器的直接连接,并在此基础上,采用UART通讯技术,实现控制器对多部电机的控制。
UART,即通用异步收发传输器( Universal Asynchronous Receiver - Transmitter )技术,是工业上采用的一种基本的串口通讯技术。在控制器和每部电机的内部,分别集成 UART ,把指令发送设备(控制器)的 UART 发送管脚( Tx )与指令接收设备(电机)的 UART 接收管脚相连接( Rx ),这样的最大优点是采用两芯电缆就可以实现控制器和所有电机的数据通讯,每部电机不需要采用单独的电缆与控制器直接连接。控制器中的 UART 发送指令数据时,其把数据的字节按照比特顺序发送;电机中的 UART 依次接收每个比特数据,并把收到的比特数据组装,即串行通讯。由于是异步通讯, UART 不需要同步时钟信号来将发送端的发送和接收端的接收进行时钟同步, UART 对数据包增加起始位和停止位,来标识数据包的开始和结束,使得接收端读取到起始位后便开始以特定的速率读取数据包。
这个速率数据传播的速度称为波特率( Baud Rate ),单位为 bit/s 。每个通用异步收发传输器包含一个移位寄存器。此外,数据包的结构可以调整,只要保证发送端和接收端商量一致即可。 UART 的发送端和接收端必须具有相同的波特率。
由于所有的电机都同时连接在同一组电缆构成的网络上, Camellia 微型控制器如何在某一时刻仅控制指定的电机动作呢?电机的地址在这里发挥出了重要的作用。 Camellia 微型控制器发送控制指令数据包到网络上,数据包中不仅含有电机控制信息(例如旋转角度、速度),还包括被控制电机的地址信息,地址就是每部电机的姓名或标识,每部电机的地址不同。电机接到数据包后,首先判断数据包中的地址是否与自己的地址相同,如果相同,才执行控制指令。当然,还可以设置一个公用地址,电机不仅辨识到自身的地址时,按照指令动作,辨识到公用地址时也进行动作。这样就实现了控制器同时控制所有的电机的功能,这称作广播( broadcast )。
- 总线( Bus )网络: Camellia 微型控制器、电机依次串行连接在一起。
- 环形( Ring )网络: Camellia 微型控制器、电机不仅相互连接,而且网络线首端和末端相连,这种结构在一定程度上保证了通讯可靠性,某一处网络线路断开时,控制器的指令仍然可以通过另一侧网络通路达到所有电机。
- 混合( Mess )网络: Camellia 微型控制器、电机任意连接,可以成星形、树形等结构。

时序控制
在时序控制功能的操控下,机器人的动作、计算机的逻辑步骤按部就班,从触发到终止,从中断到跳转,从循环到连续,每一个时间点都可以有对应的操作,每一部电机控制在规定的时间运行规定的动作。你的机器人将随音乐翩翩起舞,你的机器手臂将周而复始的连续工作,你的智能家电将根据你不同的需求开启不同的家居模式……
Camellia 微型控制器设置多组 Flash 程序存储空间,既满足多种顺序控制的记忆,也方便灵活组合,搭建循环、跳转等复杂功能,如果同时配合手机、平板和台式机的上位控制,形成串级控制,将更好地融合人机交互的自动控制功能。
i = 0;
while (!sequence.isEnd()) {
start DC motor A;
...
set PWM motor B to 90 degree;
...
broadcast all UART motor to 26 degree;
...
sequence.checkTime();
...
if( sequence. onTime()){
gotoFlash(5);
}
i++;
}
print "Welcome to Camellia Café!";
人机接口
 触摸屏是一种常见的人机接口( Human-Machine Interface )。作为机器人或电脑的一种输入设备,其通常位于显示屏上表面,可以感知触摸,并对触摸信号进行简单的处理,并将处理后的信号传输给机器人或电脑的控制器( CPU )。
触摸屏是一种常见的人机接口( Human-Machine Interface )。作为机器人或电脑的一种输入设备,其通常位于显示屏上表面,可以感知触摸,并对触摸信号进行简单的处理,并将处理后的信号传输给机器人或电脑的控制器( CPU )。
我们可以通过单指触碰或是多指手势,把我们想向机器人表达的指令或信息传递给它,与它的显示形成直接的互动。
在电阻式触摸屏中,有顶、底两层透明电阻层,顶层和底层之间有很小的间隙(未触摸时两层间是绝缘的)。显示屏(注意是用于显示)则位于整个透明触摸屏之下。
计算机把需要显示的交互界面在底部的显示屏上显示出来,我们触碰触摸屏上的某一点,计算机通过计算阻指的变化识别该点的坐标,实现人机交互。
以4线制电阻屏为例进行说明:在顶电阻层中,其左、右两边沿为易导电部分( X 电极);而在低电阻层中,其上、下边沿为易导电部分( Y 电极)。在顶电阻层的 X 电极加一个直流电压,当触碰屏幕上的某一点,使得顶电阻层和底电阻层在该点接触,则在底电阻层的 Y 电极之间将可以检测到一个对应的电压值,通过计算即可以获得触摸点在 x 坐标;交替,在底电阻层的 Y 电极之间施加一个直流电压,并检测顶电阻层的 X 电极之间的电压值,可以获得触摸点在 y 坐标。综上确定了触摸点在二维空间的具体位置(x y)。
在电容式触摸屏中,在一个绝缘体表面覆盖一层透明的导体(工作层)。
由于人体导电,当触碰触摸屏时,引起触摸屏的静电场发生变化,实际中可以通过检测电容值的变化来实现感知。
对触摸屏施加电压时,当手指或其他导体接触触摸屏时,形成了一个耦合电容,由于该工作层上接有高频信号,于是手指或其他导体吸引起了一个很小的电流流动,这个电流分别从屏的四个角上的电极中流出,传感器通过测量触摸屏四个角的电容值变化(电流值),经过综合计算,可以得出具体的接触坐标。通常,检测到的电容值变化越大,则证明触摸点越靠近屏幕的边角。
![]() LED 点阵的显示控制是将多个 LED 全部共阳极或共阴极连接,按显示编码的顺序,一行一行地显示。每一行的显示时间大约为 4ms ,由于人类的视觉暂留现象,将感觉到多行 LED 是在同时显示。以共阳极连接为例,轮流给行信号输出高电平,同时根据图形信息,控制该行每列的低电平输出信号,就可以实现需要显示的图像。
LED 点阵的显示控制是将多个 LED 全部共阳极或共阴极连接,按显示编码的顺序,一行一行地显示。每一行的显示时间大约为 4ms ,由于人类的视觉暂留现象,将感觉到多行 LED 是在同时显示。以共阳极连接为例,轮流给行信号输出高电平,同时根据图形信息,控制该行每列的低电平输出信号,就可以实现需要显示的图像。
彩色点阵显示就在此基础上,把多个不同颜色的发光点集中在一起,并分别控制,由于这些点非常小并且紧密排列在一起,就好象一个像素点,并且不同颜色的叠加组合,在我们眼中就会感觉看到了更多的颜色,从而实现了彩色显示。
Camellia 微型控制器根据图形信息,通过串行通讯的方式发送一组二进制数据给译码器芯片,该芯片根据接收到的二进制数据,控制 8 位的行信号及 16 位的列信号输出,在 8x8 位彩色点阵上进行显示。
经典计算机或当下机器人实质上仅能识别0和1构成的信息,如果仅有 0 和 1 ,机器人很难和我们交流。如何把 0 和 1 转换为人类能够认识的数字、字母、文字和符号呢?需要采用不同的编码,即每个数字、字符、文字和符号等都对应一个数值(二进制数)。当然每个人都可以约定自己的一套编码规则,而大家如果要想互相通信而不造成混乱,那么大家就必须遵循相同的编码规则。
American Standard Code for Information Interchange 由 American National Standard Institute 制定,是一种标准的单字节字符编码方案,适用于所有拉丁文字字母。
ASCII 码使用指定的 7 位或 8 位二进制数组合来表示 128 或 256 种可能的字符。标准 ASCII 码使用7位二进制数来表示所有的大写和小写字母、数字 0 到 9 、标点符号,以及在美式英语中使用的特殊控制字符,其最高位用作奇偶校验位。
扩展 ASCII 码将最高位用于确定附加的 128 个特殊符号字符、外来语字母和图形符号 。
利用 Camellia 手机程序,输入一个字母或数字吧,在 Camellia 控制的点阵显示屏上看看你输入的字母或数字的 ASCII 码是什么?
既然经典计算机仅能识别 0 和 1 ,那么计算机或机器人又是如何进行加减乘除运算的呢?
加法和减法就是二进制运算,逢 2 进 1 或逢 2 退 1 ;乘法就是每乘 2 显示点左(上)移一位,相当于左(上)移运算,除法则相当于右(下)移运算。
物联网
Machine to Machine - M2M
没有人类的操作和干预,联网的设备也能自动交互信息。人工智能等机器学习技术的普及,便利了信息的交互,提高了机器的自治。机器和机器互联的网络,需要:
延展( Scalability ):机器可以随时加入到已知网络中,并立刻开展通讯。
匿名( Anonymity ): 根据法律法规或需求,随时隐藏机器的标识身份,保证信息安全。
通讯( Communication ) :无线局域网络的蓝牙( Bluetooth )或无线联盟( Wi-Fi )技术, Internet 的 Message Queuing Telemetry Transport 通讯协议。
传递( Delivery ):支持单播( unicast )、任播( anycast )、多播( multicast )和广播( broadcast )。
指示( Indication ):LCD 显示。
操纵( Action ):伺服电机( servo motor )控制功能精准实现每一个动作。
智能( Intelligence ):灵活的编程方式便利了数据分析及动作触发。
Human to Machine - H2M
试想一下,从早上起床到晚间入睡,我们不仅通过通讯设备实现了人类的联系,还与周围的万物实现了连接,这将是怎样的景象?即使睡眠中,我们的心跳和呼吸等症状也被检测。或许,我们与机器的通讯技能将如同呼吸一样成为我们的本能。
回想一下,我们将充分利用人机通讯,助力我们的孩子,通过仿真,深入巩固他们/她们的数学、物理和化学等知识。
畅想一下,我们将充分利用人机通讯,在世界的某个角落,让机器臂和人形机器人为我们工作。
远想一下,我们将充分利用人机通讯,把我们的健康数据可靠地传输到远方的诊所,避免排队的烦扰。
学习、工作、生活,友善的人机界面和 自然语言处理技术( Natural Language Processing )还使我们面对互联的机器时,并不觉得它是一台机器,它已经变成了他或她,它已经通过了图灵测试( Turing Test )。
Peer-to-Peer - P2P
分布式的网络结构,使得网络中的每一个节点都肩负起社会的责任。
在这里,大家权利平等、义务合作。
在这里,信息直接实现点对点的分享,无需传统的中心服务器( server )。
在这里,每一个节点既是服务器( server )又是客户端( client )。
在这里,每一个节点可以控制另外一个节点,也可以被别的节点所操作。
在这里,每一个节点既是资源的生产商,也是资源的消费者。
在这里,无需担心各节点工作平台的不同, Android 、 iOS 、 Windows 以及底层硬件系统等都可以无障碍的跨平台开发、通讯。
在信息共享下,建立群智工作模式。拥有不同技能的节点,各自发挥独有的优势,组建强大的社团,共同完成复杂的任务。当众多数字化机器、机器人和无人机,天地协同,打造出美丽环保的电子烟花盛宴,将是何等的壮观。
去中心的物联网更增大了整个系统的鲁棒性,试想一台机器人因故障而倒下,其他机器人将自动分担故障节点的任务,不影响整个任务的最终完成。更多节点的加入,将实现更加完美的工作。
群智控制
Camellia 微型控制器可以在同一时间或采用时序控制模式,控制多部电机,每一部电机都可以与其他电机相互协调。
当采用多部 Camellia 微型控制器时,每部控制器都可以与其他控制器通讯交流,既可以在手机、平板和台式机为中心的统治下,积极工作,也可以构建去中心化的分布式网络,自治、合作。
受益于物联网和人工智能技术,结合 Ant Colony Optimization 、 Artificial Bee Colony 以及 Social Spider Optimization 等算法,群智技术不断成熟完善:
电动汽车的各个车轮将更加完美的配合,不仅适时调整其转速,还合理调整其转向角度,实现最强的防打滑脱困动力、最小的转弯半径、最佳的泊车方式……
多部机器手臂将娴熟配合……
多个人形机器人将呈现完美的芭蕾舞蹈,高雅的歌剧表演……
成百上千的无人机将在晴朗的夜空绽放出美丽的电子烟花……