
MOTORCYCLE SIDECAR
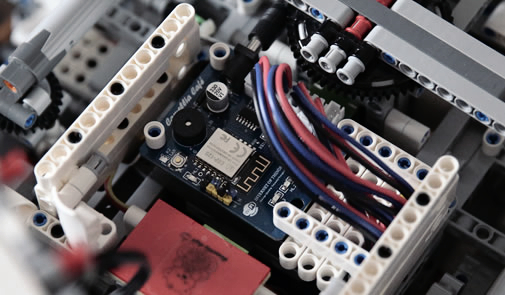
Camellia Mini Capsule DC Controller gives perfect IoT function to this cool Motorcycle Sidecar.
Explore this ModelMicro and Multiple, Ccompact and Flavorful
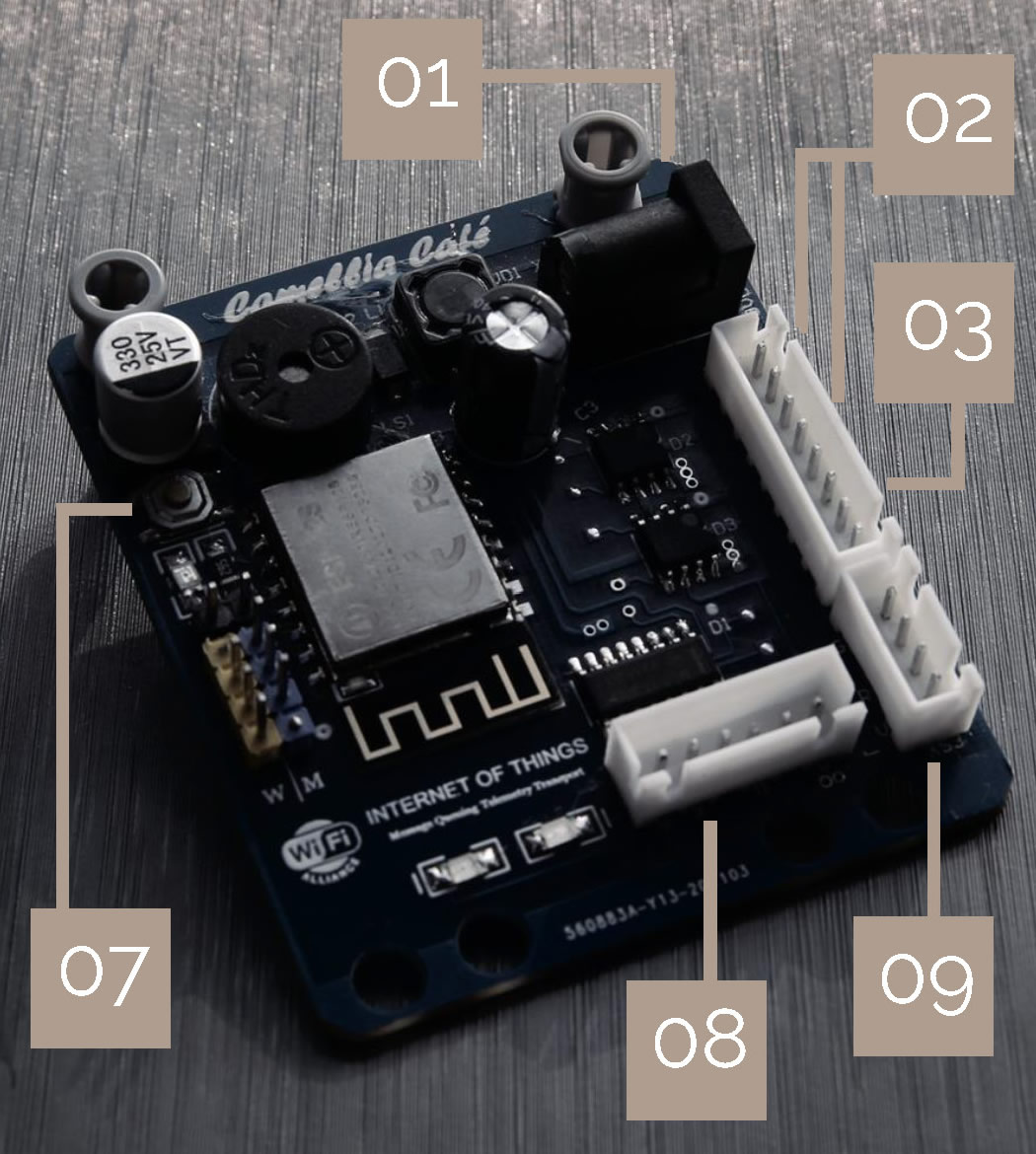
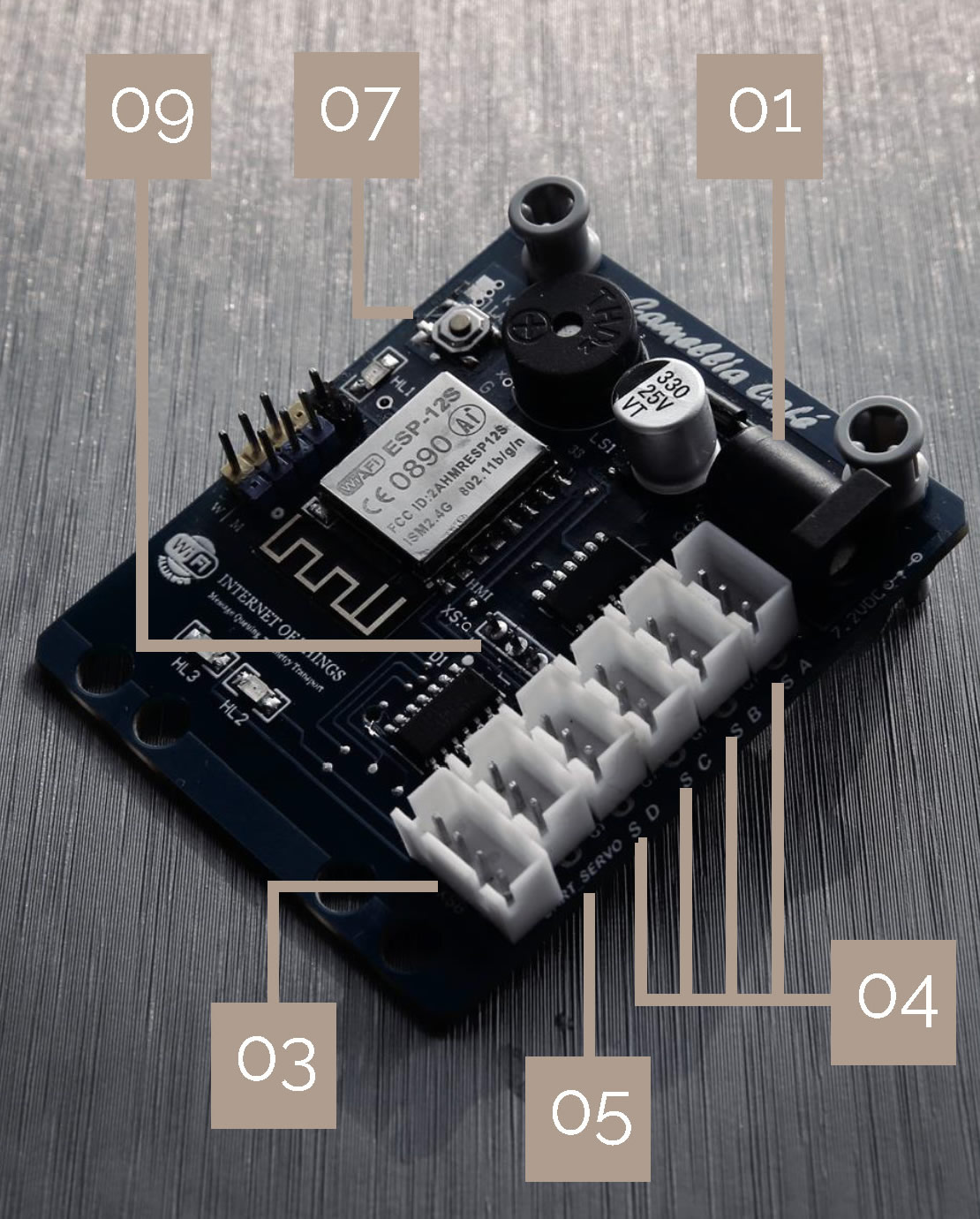
| 01 | POWER | 6VDC – 12VDC. |
| 02 | DC Motor | Two DC motor control ports, |
| 03 | LED | Two LEDs. |
| 04 | PWM Steering Servo Motor | Four PWM steering servo motor control ports. |
| 05 | UART Steering Servo Motor | UART steering servo motor control ports. |
| 07 | Model Button | Select a Wireless Local Area Network model or a Wide Area Network model. |
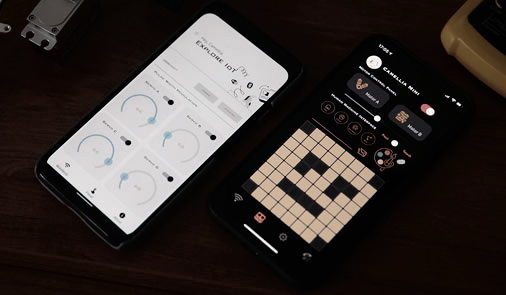
| 08 | Pixel Display | 8x8 colourful pixel display LEDs port. |
| 09 | HMI | Touchscreen port. |








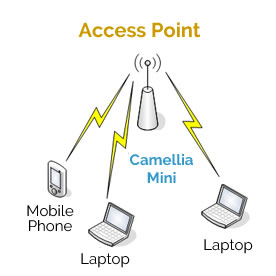 Camellia Mini Controller works as an Access Point, configuring a Wireless Local Area Network.
Camellia Mini Controller works as an Access Point, configuring a Wireless Local Area Network.
Wi-Fi is a family of wireless network protocols, based on the IEEE 802.11 family of standards, which are commonly used for local area networking of devices and Internet access, allowing nearby digital devices to exchange data by radio waves.
Wi-Fi uses multiple parts of the IEEE 802 protocol family and is designed to interwork seamlessly with its wired sibling Ethernet. Compatible devices can network through wireless access points to each other as well as to wired devices and the Internet. Wi-Fi most commonly uses the 2.4 gigahertz (120 mm) UHF and 5 gigahertz (60 mm) SHF radio bands; these bands are subdivided into multiple channels. Channels can be shared between networks but only one transmitter can locally transmit on a channel at any moment in time.
Look at your Robots or AIs directly and operate them at home or in the office, even outside.
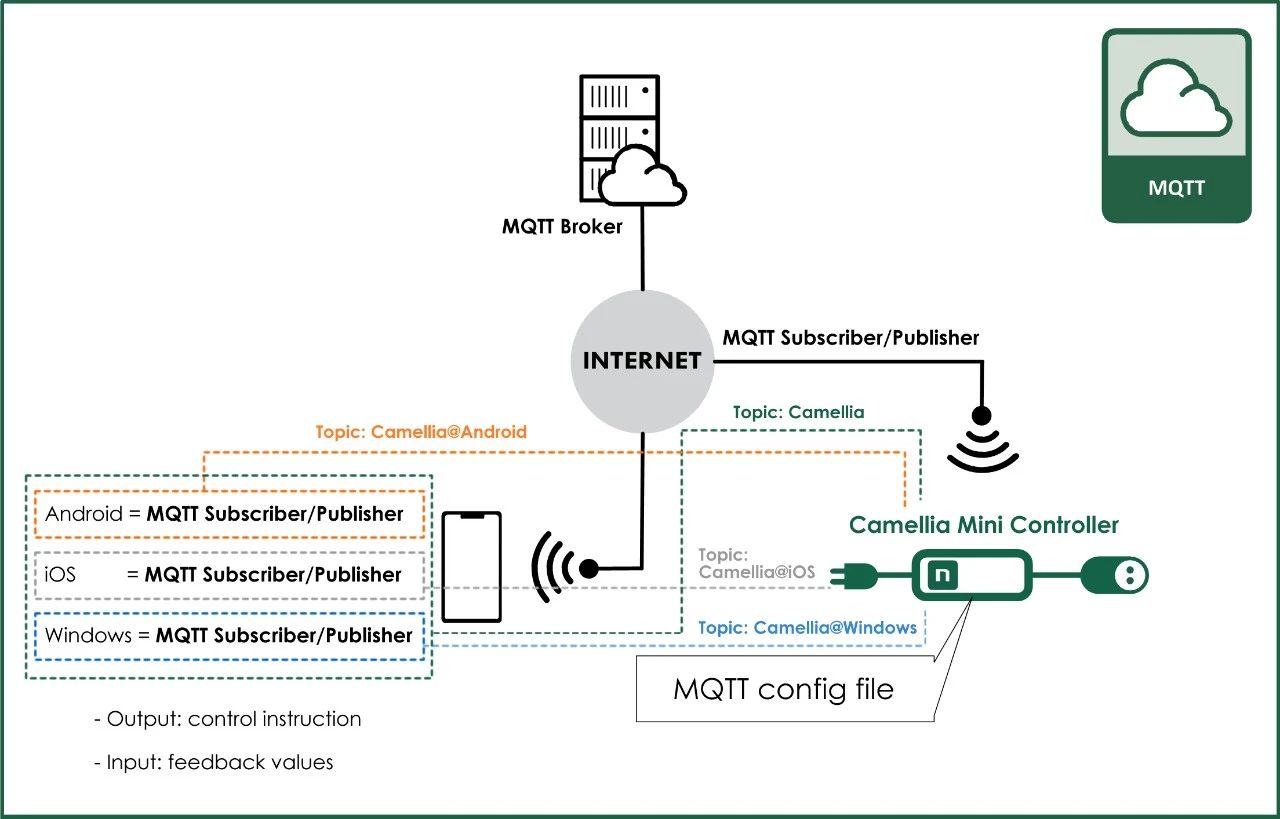
 Camellia Mini Controller works as a Station, connecting to the Internet.
Camellia Mini Controller works as a Station, connecting to the Internet.
Message Queuing Telemetry Transport is an OASIS standard messaging protocol for the Internet of Things. It is designed as an extremely lightweight publish/subscribe messaging transport that is ideal for connecting remote devices with a small code footprint and minimal network bandwidth.
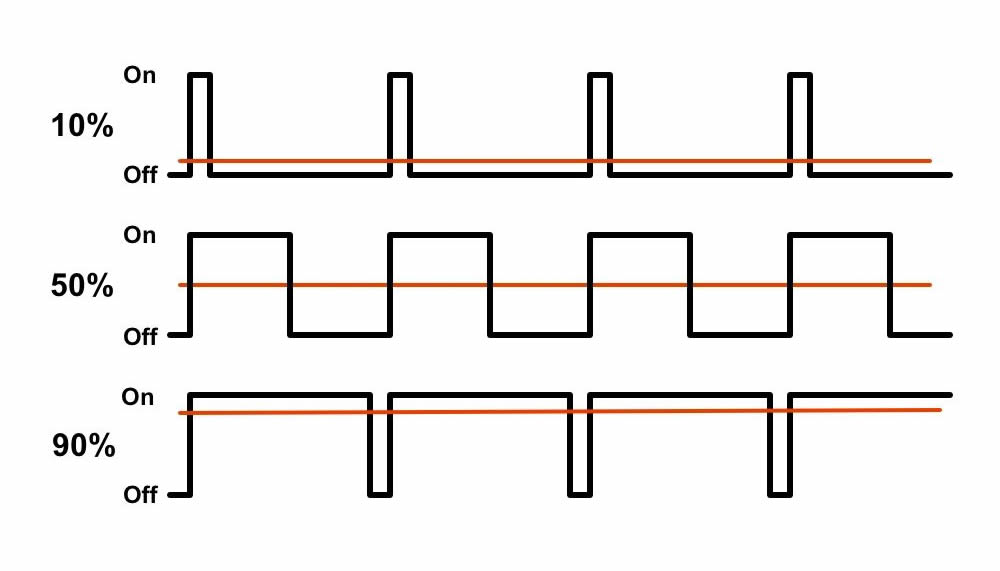
Pulse-Width Modulation is a method of reducing the average power delivered by an electrical signal, by effectively chopping it up into discrete parts. The average value of voltage (or current) fed to the load is controlled by turning the switch between supply and load on and off at a fast rate. The longer the switch is on compared to the off periods, the higher the total power supplied to the load.
PWM is particularly suited for running inertial loads such as motors, which are not as easily affected by this discrete switching, because their inertia causes them to react slowly.
The PWM switching frequency has to be high enough not to affect the load, which is to say that the resultant waveform perceived by the load must be as smooth as possible.
The frequency at which the power supply must switch can vary greatly depending on load and application:
Camellia Mini Controller uses 50Hz PWM as setpoints to Servo Steering Motor.
Camellia Mini Controller uses 6k or 7kHz as signals to control DC Motor.
PWM signal range from 5% to 95%, with 40Hz to 7kHz, could be output from Camellia Mini Controller as required.

An H-Bridge is an electronic circuit that switches the polarity of a voltage applied to a load.
Camellia Mini Controller uses this circuit to allow DC motors to run forwards, backwards, stop or break.
A Universal Synchronous Receiver-Transmitter is a computer hardware device for asynchronous serial communication in which the data format and transmission speeds are configurable. It sends data bits one by one, from the least significant to the most significant, framed by start and stop bits so that precise timing is handled by the communication channel. The electric signaling levels are handled by a driver circuit external to the UART.
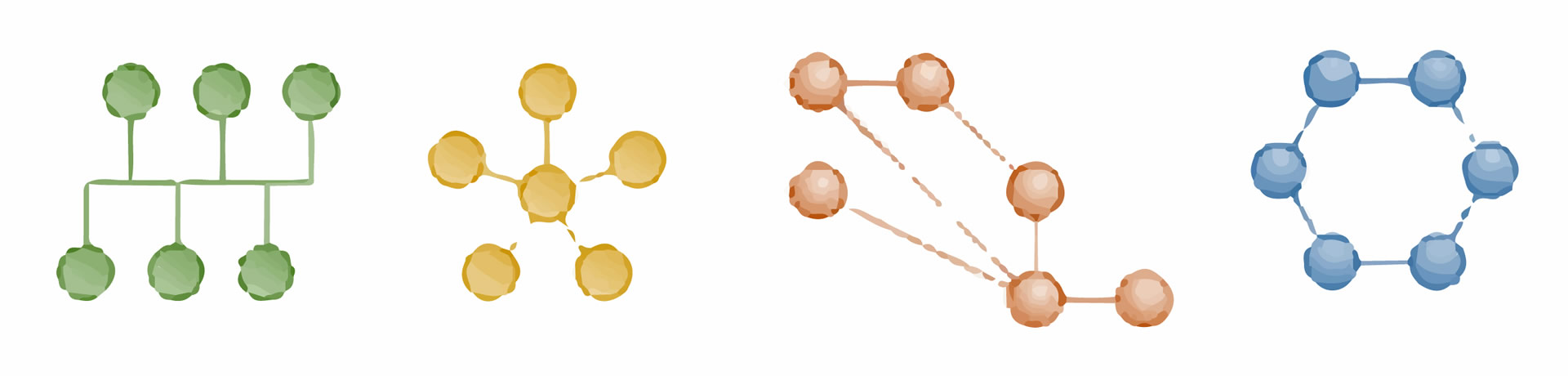
Two UART ports in Camellia Mini Controller have the same output signal simultaneously; a redundant Bus network or a Ring or a Mess topology network could be configured.
i = 0;
while (!sequence.isEnd()) {
start DC motor A;
...
set PWM motor B to 90 degree;
...
broadcast all UART motor to 26 degree;
...
sequence.checkTime();
...
if( sequence. onTime()){
gotoFlash(5);
}
i++;
}
print "Welcome to Camellia Café!";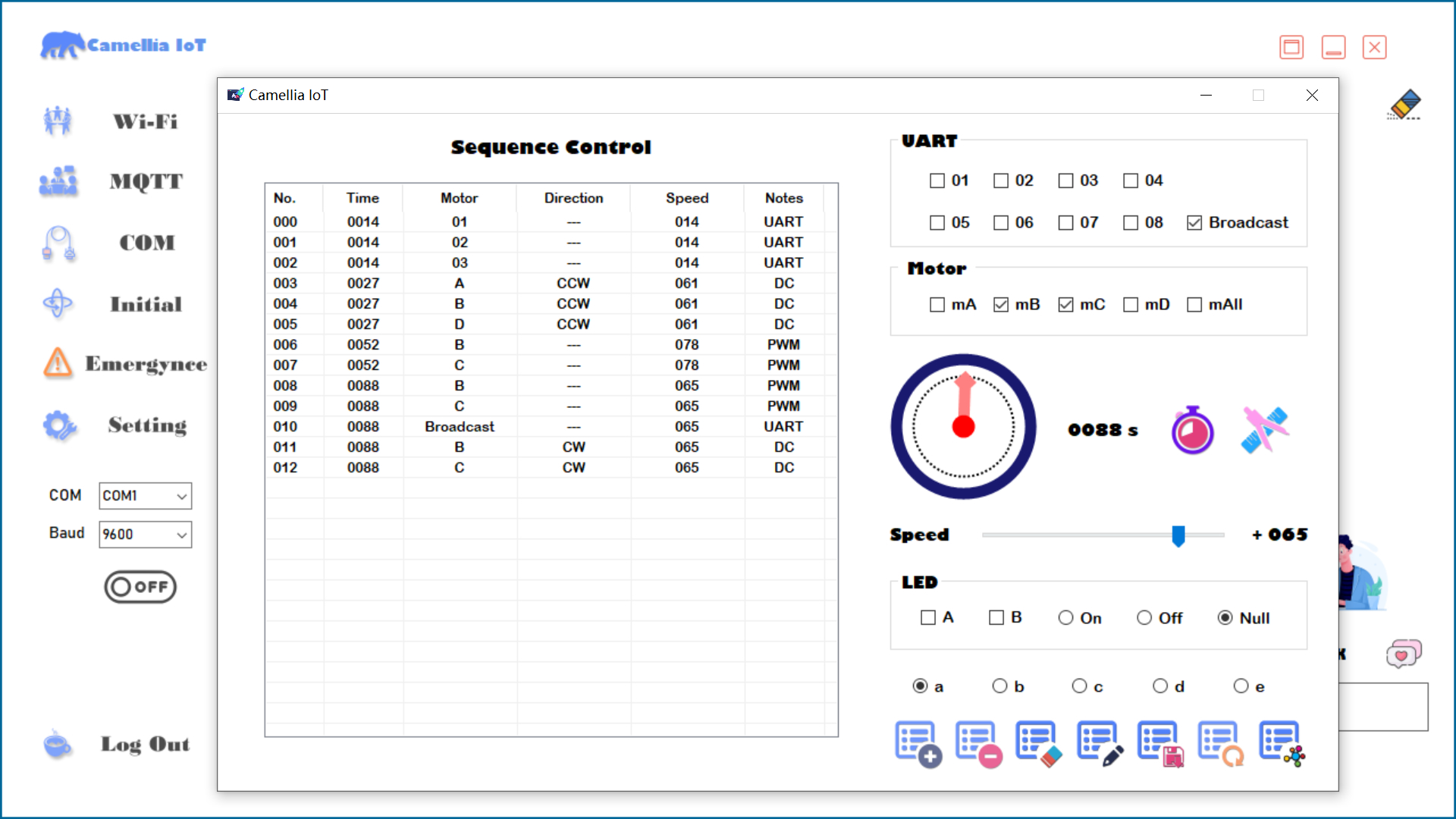
 A Touchscreen enables the user to interact directly with what is displayed, rather than using a mouse, keyboard, or other such.
A Touchscreen enables the user to interact directly with what is displayed, rather than using a mouse, keyboard, or other such.
It is one of Human-Machine Interface. It is an input device and normally layered on the top of an electronic visual display of an information processing system.
Imagine what we can do, now, using Human-to-Machine communications creativity, to help our children to increase their mathematical, physical and chemical knowledge.
Imagine what we can do, now, using Robots or Droids to help us to do everything everywhere in the world.
Imagine what we can do, now, using extremely reliable health monitors connected to local clinics where health workers can serve large populations across geographies using distance medicine.
![]() A Colourful Pixel Display is the basic window to a robots' heart.
A Colourful Pixel Display is the basic window to a robots' heart.
The pixel is two or more tiny LEDs with different colour put very closely. When some LEDs are on, others are off, or all are on, you will see a different colour thinking it is only one pixel.
Language of Robot or AI machines is different from us. It is 0 and 1, which is called Binary System. Let us see how a robot does calculations of adding, subtracting, multiplying and dividing.
Besides, “AND”, “OR”, “NOT”, and “NOR” are logic operations. They are Booleans. “if-else”, “switch-on”, “while”, and “for” are basic coding.
Third, it is ASCII code that translates robot or computer language to our human’s words.
Machine to Machine, or M2M is any technology that enables networked devices to exchange information and perform actions without the manual assistance of humans.
Human to Machine, or H2M with inventions which are securing sensors and controllers, is protecting data in motion, improving the performance of connectivity solutions, and instrumenting almost every aspect of our lives.
Peer-to-Peer, or P2P is a distributed application architecture that partitions tasks or workloads between peers. Peers are equally privileged, equipotent participants in the application. In a P2P network, the peers are smart devices which are connected via the Internet. Information can be shared directly between devices in the network without the need of a central server.
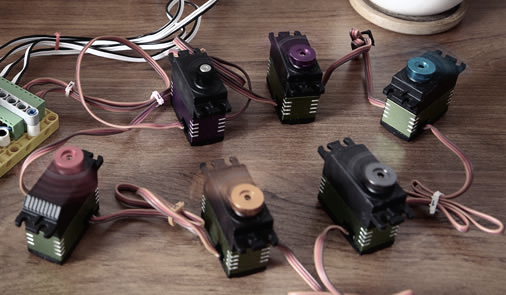
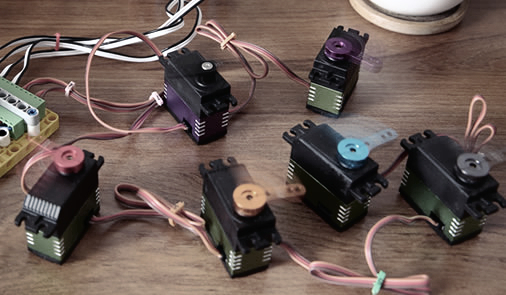
Camellia Mini Controller controls any motors at the same time or in sequence. Each motor or controller communicates with others. All are in the autocracy of a PC/Phone/Pad.
In artificial intelligence and based on the collective behaviour of elements in decentralized and self-organized systems, Swarm Intelligence has significant involvement in the area of Internet of Things to control their operations logically. As IoT-based systems are complex and consist of intelligent objects, powerful decentralized algorithms supported by Swarm Intelligence are used to resolve such complex problems. Algorithms like ant colony optimization, artificial bee colony, and social spider optimization play essential roles in normalizing the IoT processes.
This will help four wheels of a car run respectively, two robot arms work together, three droids play a ballet, and dozens of drones display a 3D firework in the sky…
Camellia Mini Capsule DC Controller gives perfect IoT function to this cool Motorcycle Sidecar.
Explore this ModelA particular designed Computer with a Pixel Display Screen and a Touchscreen being controlled by Camellia Mini Capsule DC Controller.
Explore this Model