模型秀
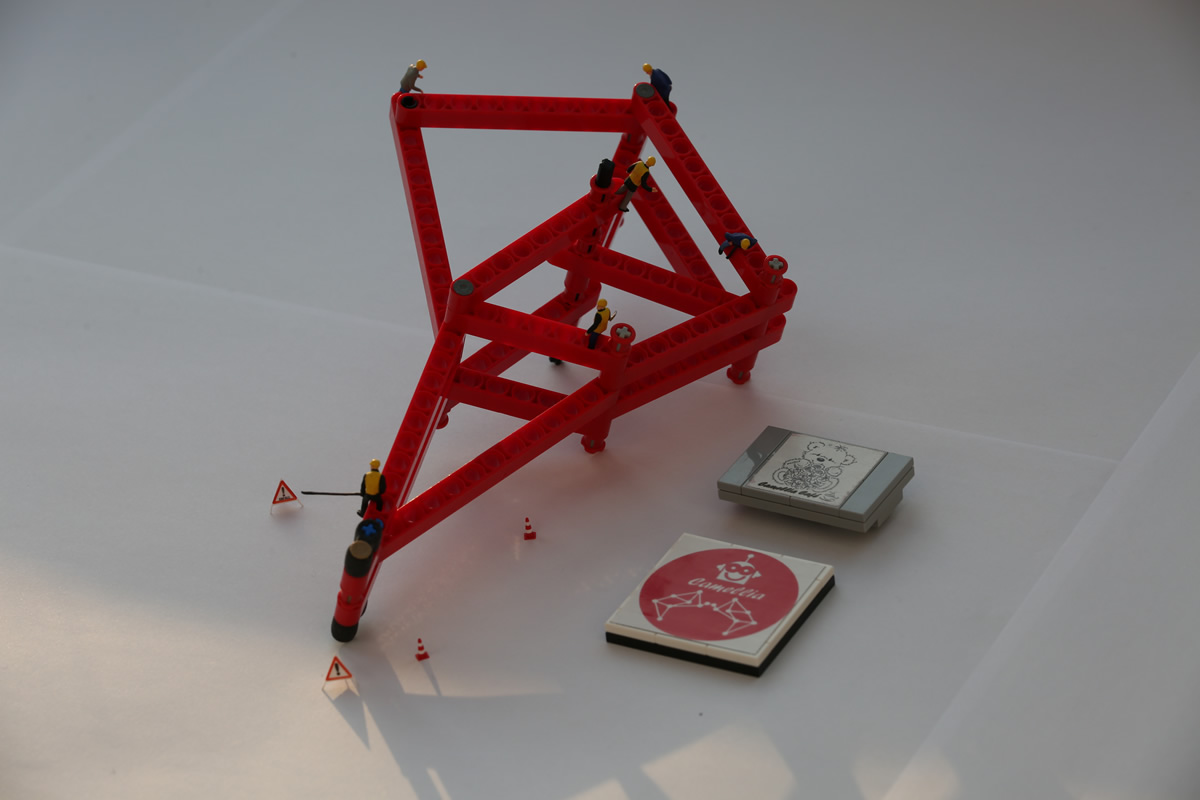
腿部
11个运动轴和2个固定轴构成了具有8个关节的腿。
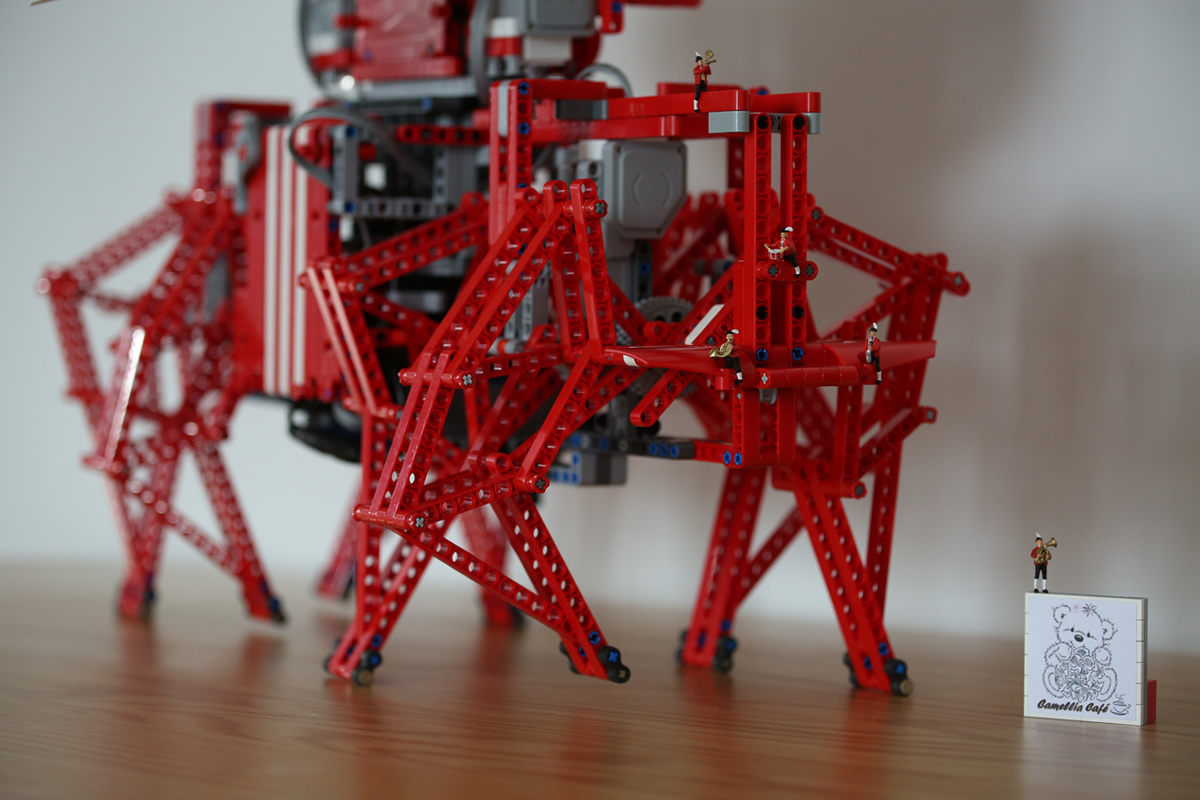
下肢
左下肢和右下肢采用2台电机驱动各下肢前后又各有2条腿
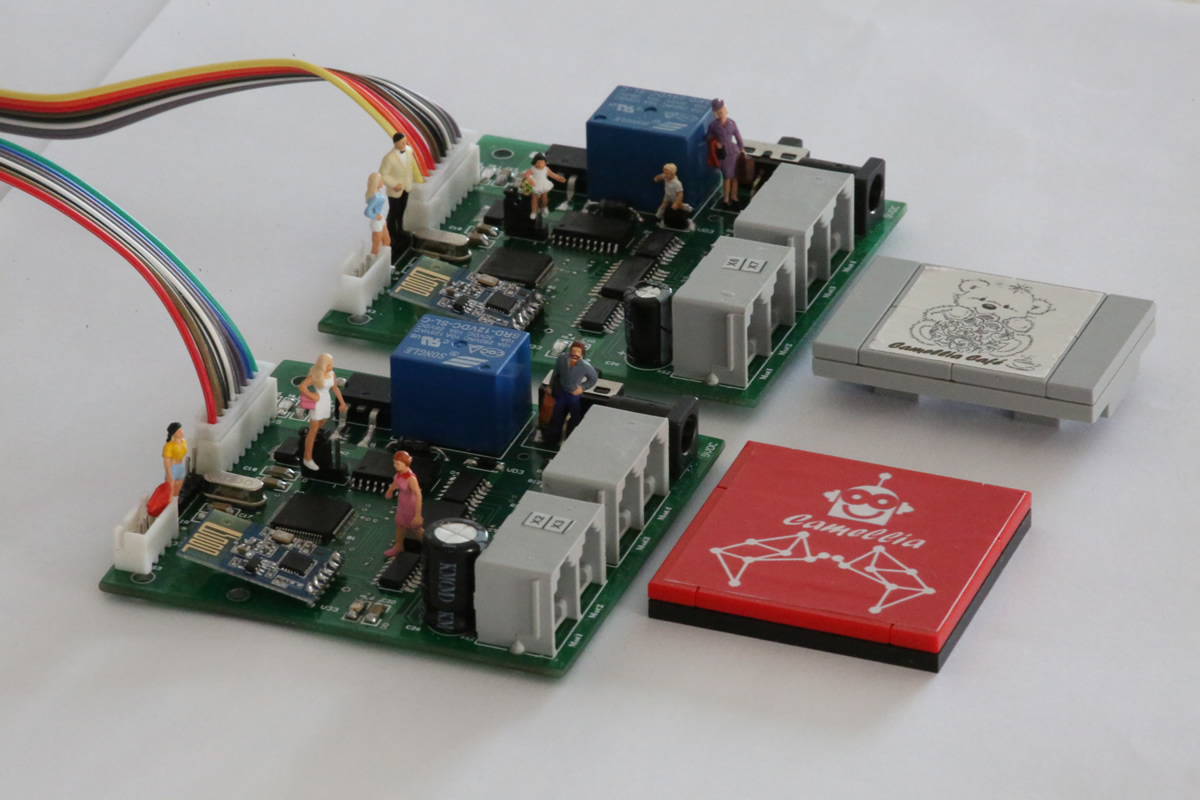
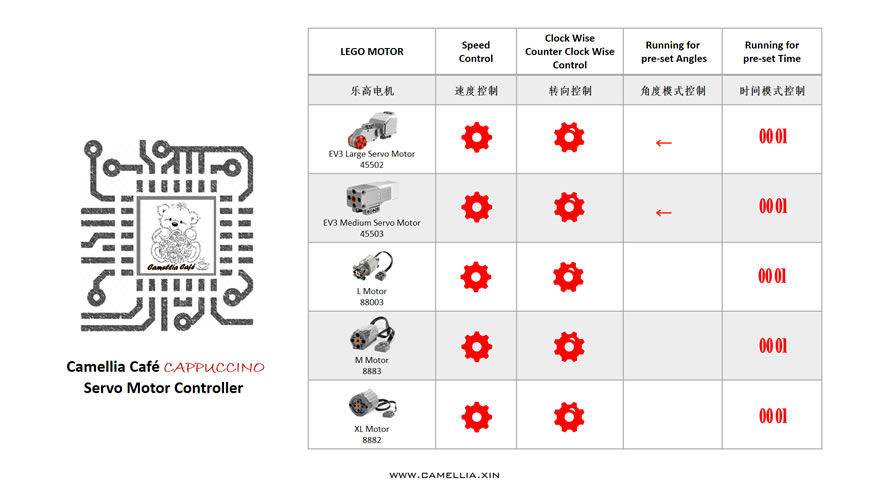
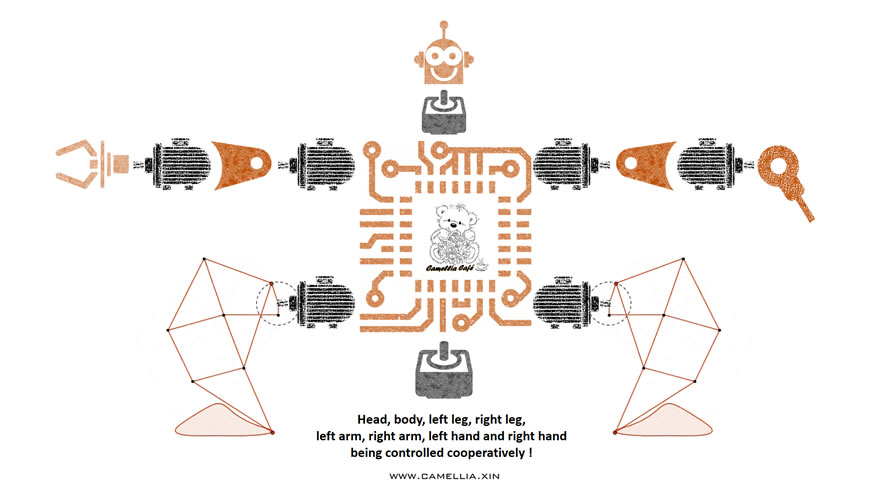
控制器
采用嵌入式(ARM)技术的Camellia Café CAPPUCCINO 型控制器
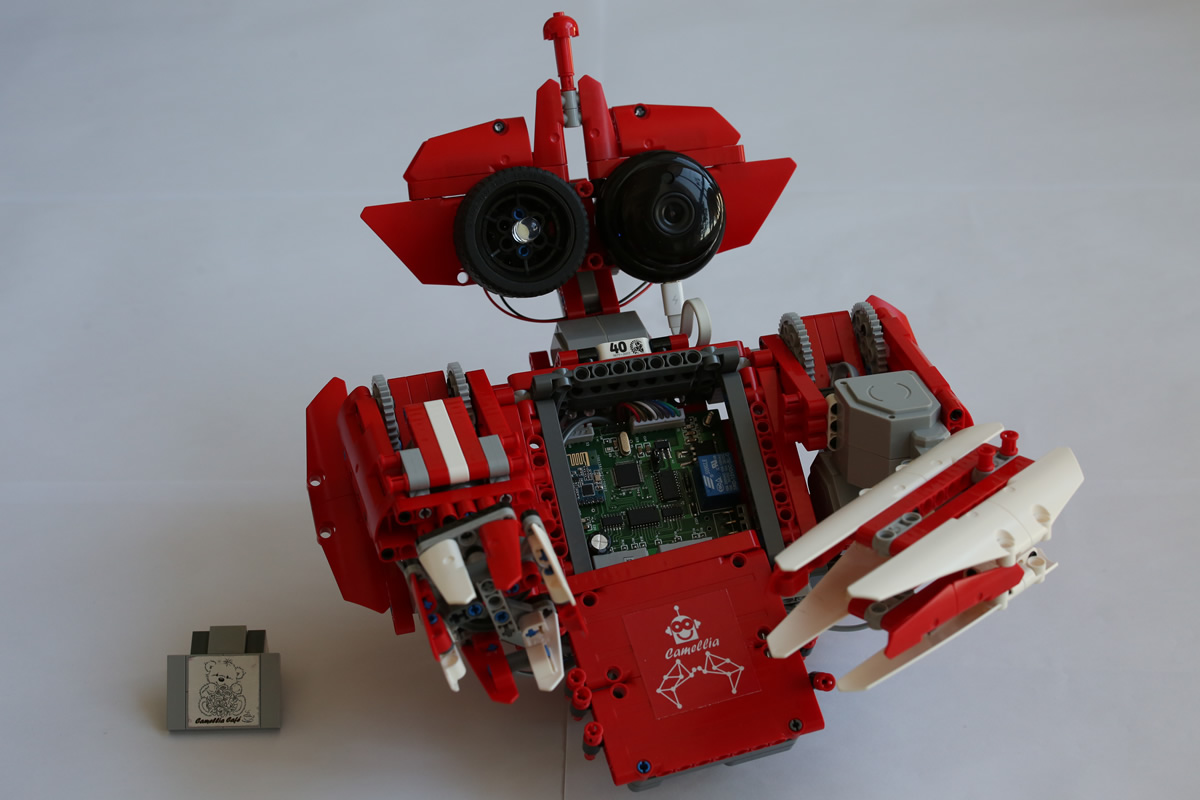
上身
控制器是机器人的心脏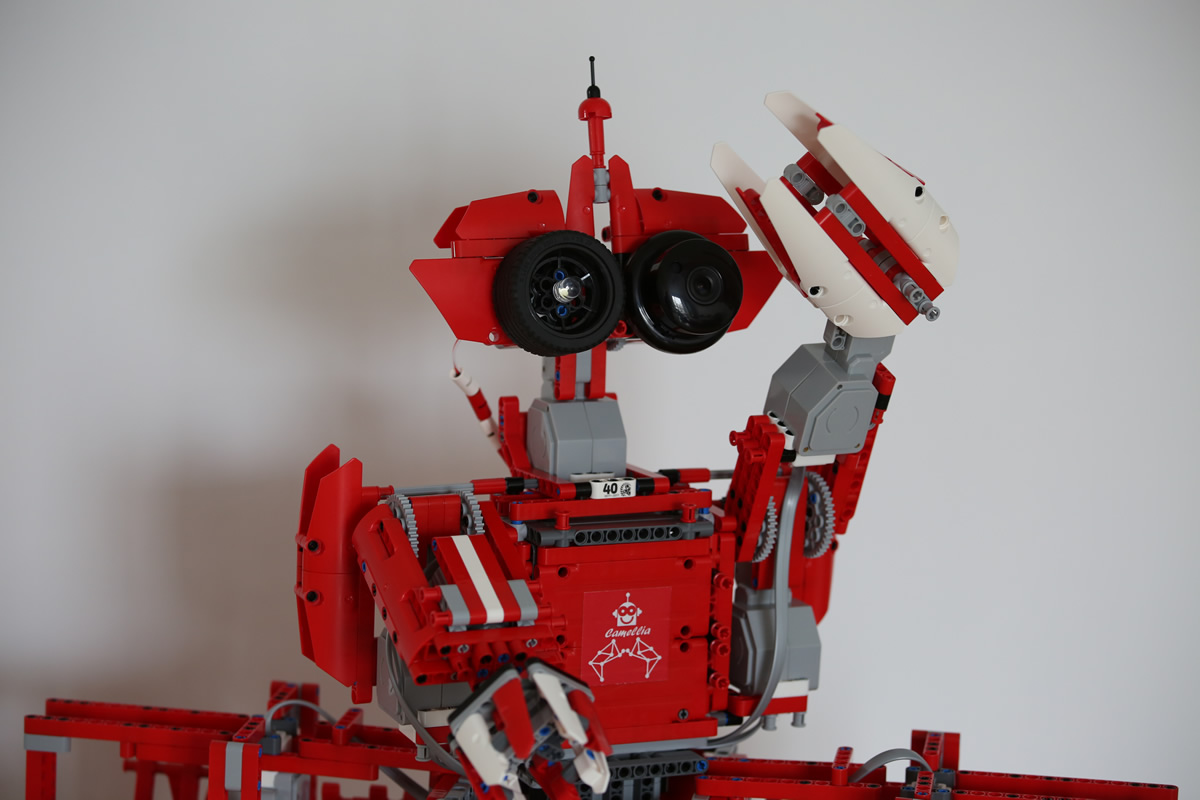
敬礼
机器人左手行礼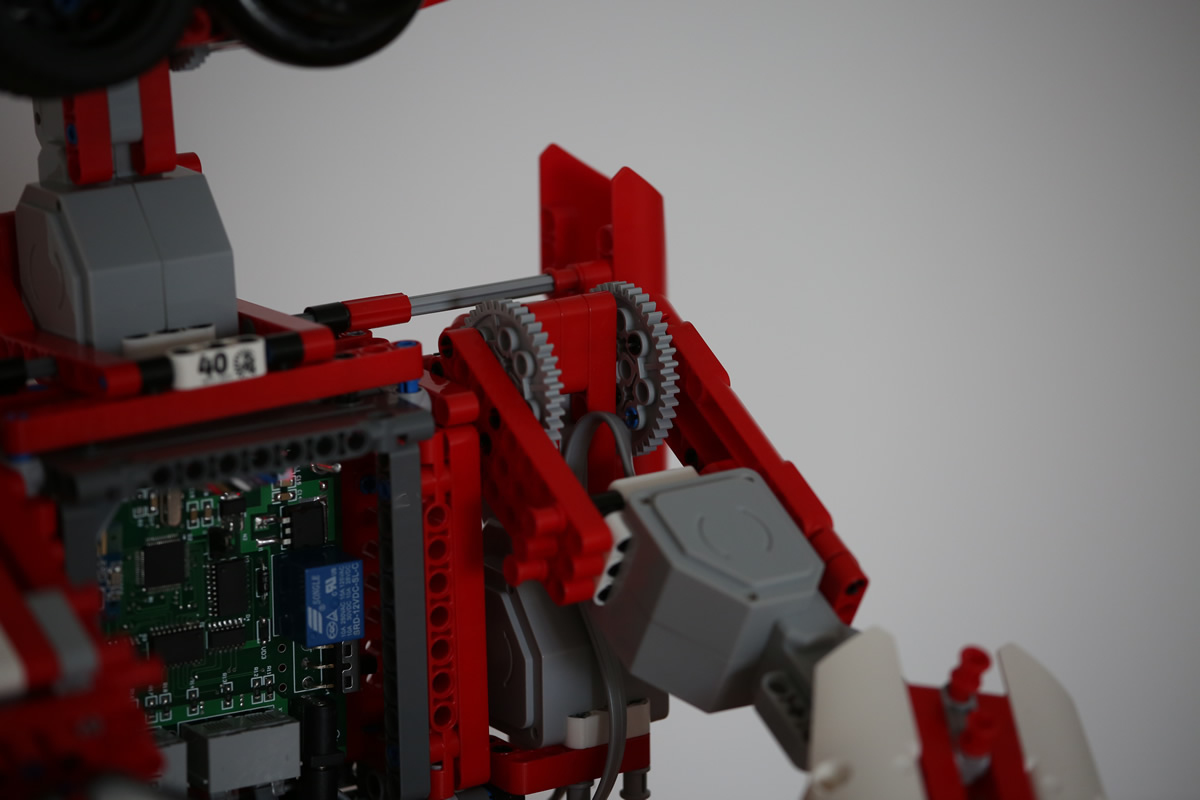
左臂
左臂采用一部电机驱动
右手
右手采用一部电机驱动其转动
点头
头部采用一部电机驱动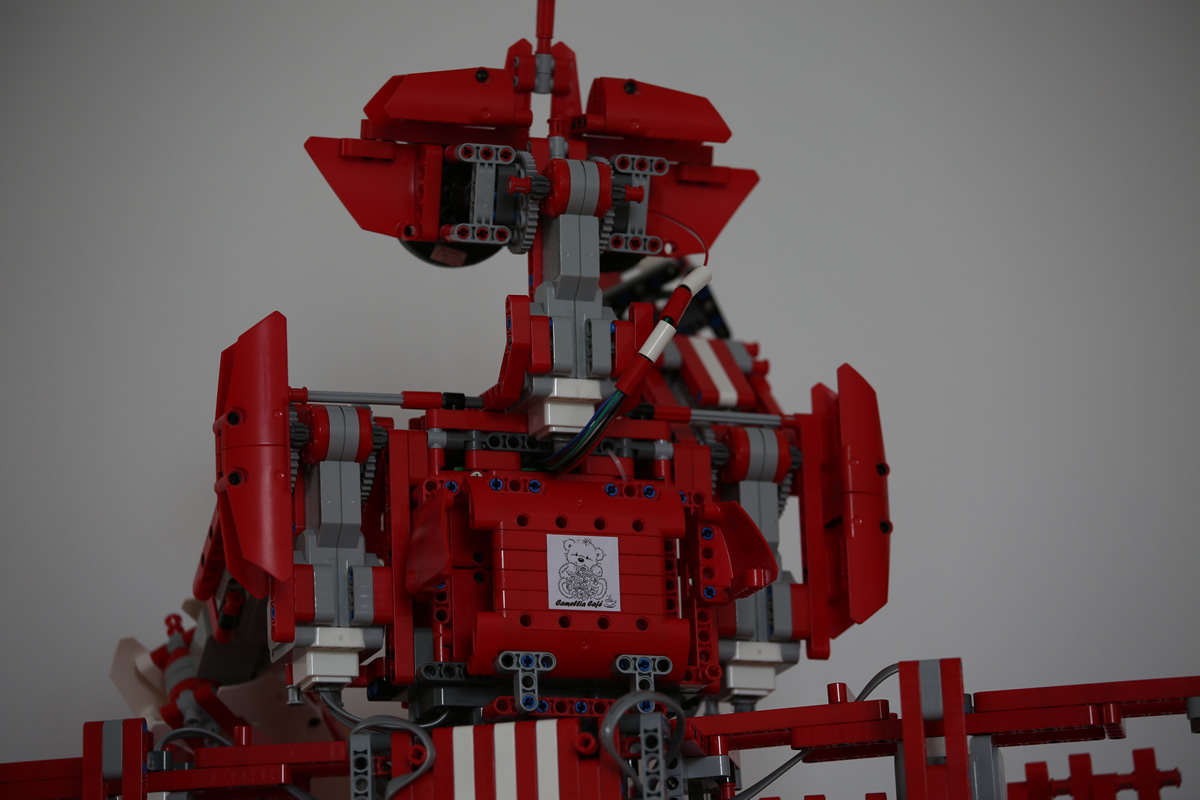
背影
伺服仿生兽的背影
眼睛和头
其中一只眼睛是一部摄像机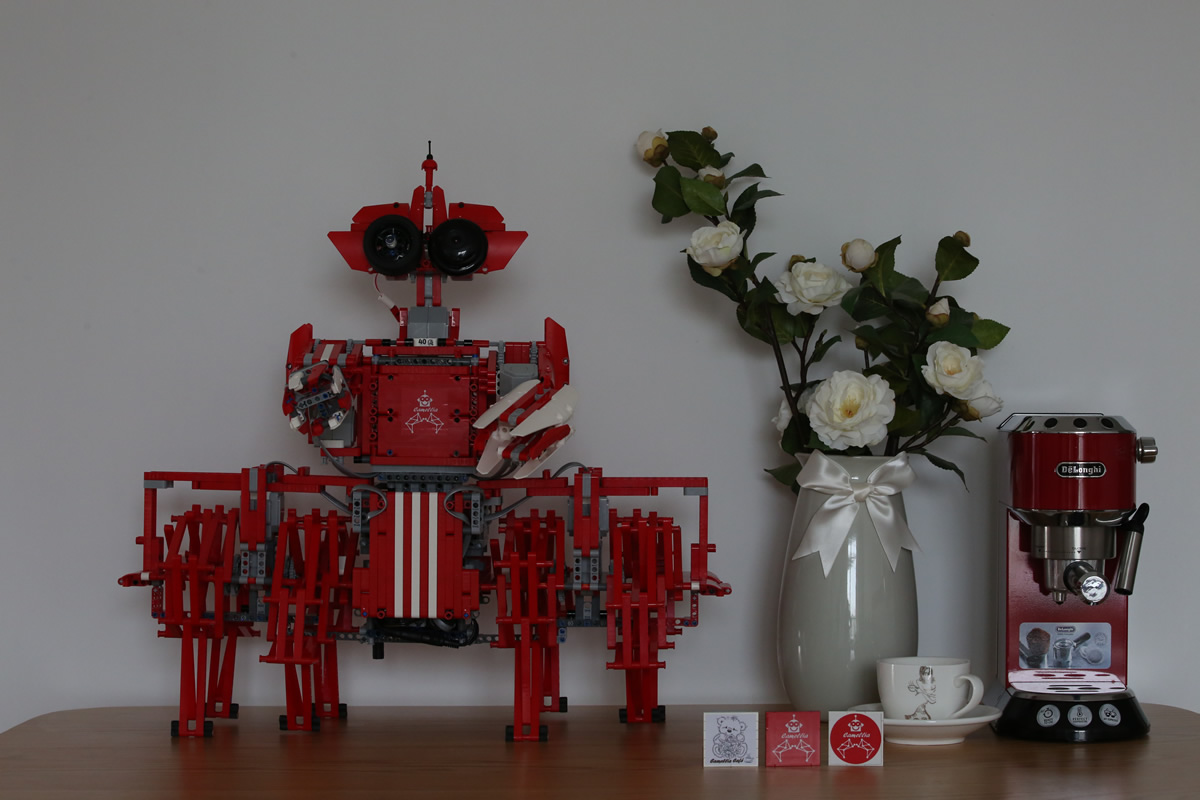
全身照
这就是我,伺服仿生兽
腰部
腰部采用一部电机驱动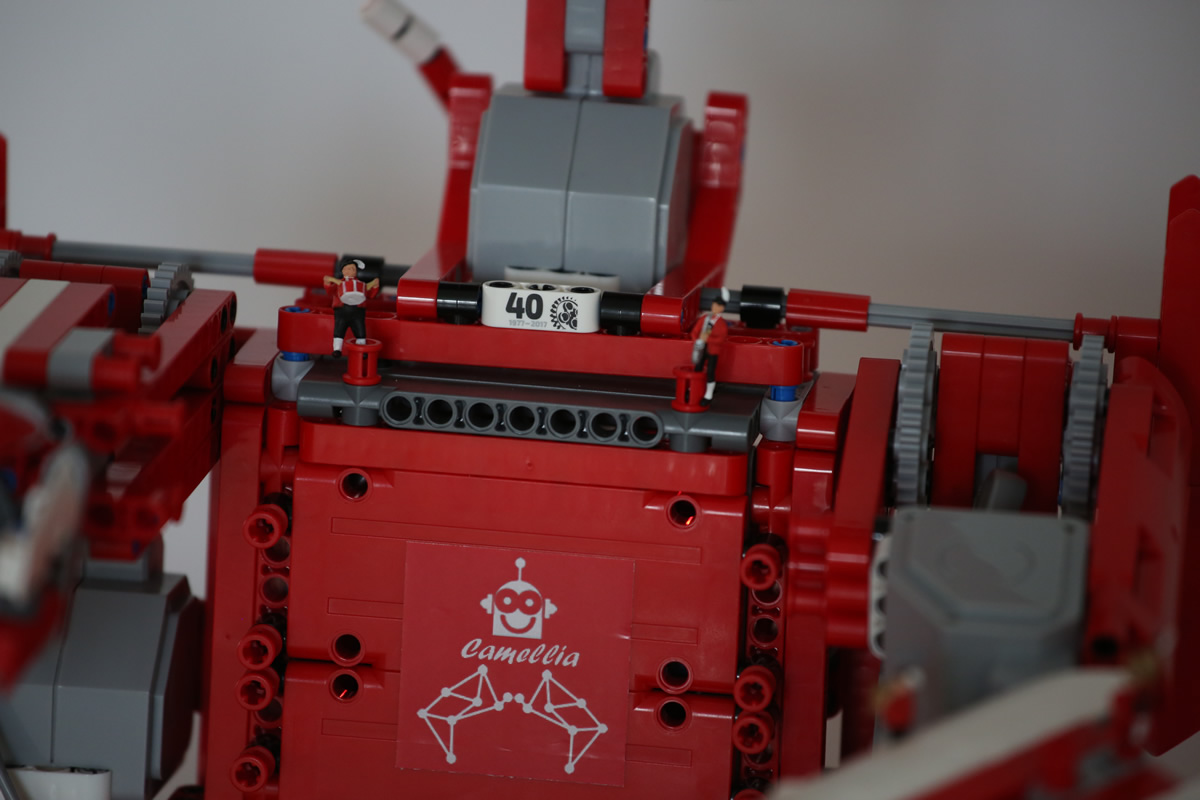
身体外衣
乐高科技40周年纪念版标识1997-2007
右臂
右臂采用一部电机驱动